Descripción
Pila 30*30 MicoAir405v2 F405
NOTA IMPORTANTE: Después de recibir el producto y ANTES DE SOLDAR, conéctelo primero a BF y asegúrese de que todo funcione correctamente. Si tiene alguna duda, póngase en contacto con nuestro servicio técnico.
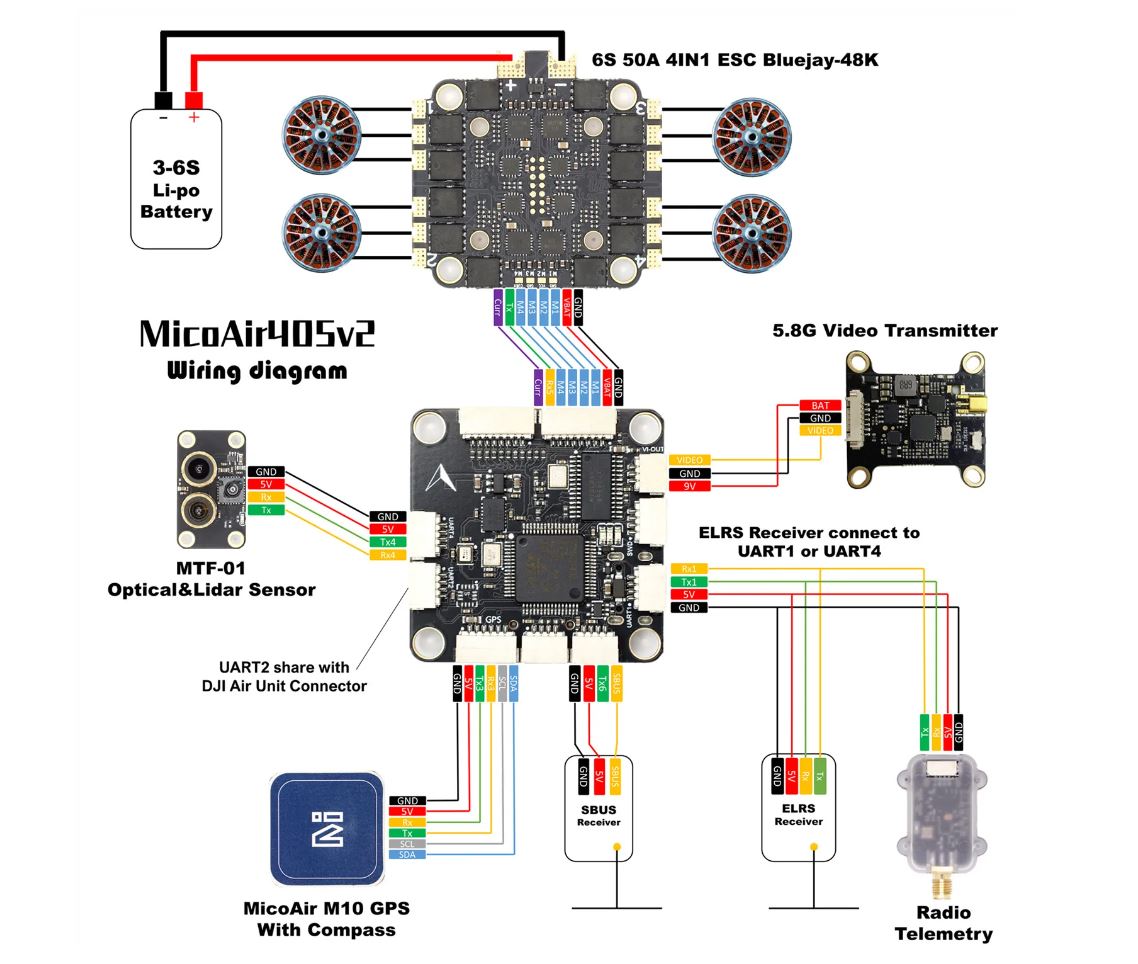
Controlador de vuelo MicoAir405v2 F405 con ESC Bluejay 50 Amp 4 en 1
Descripción
El MicoAir405v2 es un nuevo controlador de vuelo que ejecuta el firmware Ardupilot e INAV, diseñado y fabricado por MicoAir Technology.
Este es el primero que combina el STM32F405 con el sensor IMU de alto rendimiento BMI088, lo que permite que los controladores de vuelo tengan el mejor rendimiento y un Precio atractivo al mismo tiempo.
El BMI088 es un sensor IMU de 6 ejes de alto rendimiento que proviene de Bosch®, su excelente estabilidad de temperatura y robustez de vibración superan con creces productos similares en el mercado, lo que lo hace especialmente adecuado para aplicaciones de drones y robótica.
El MicoAir405v2 también integra un barómetro de alto rendimiento: SPL06, y chip OSD: AT7456E, 2 canales de DC-DC para proporcionar una salida de potencia de 5V-3A y 9V-3A. Estas características hacen que este controlador sea especialmente adecuado para drones FPV de largo alcance.
Obtenga más detalles en el sitio web oficial:
Micoair.com/index.php/flightcontroller_micoair405v2/
Especificaciones
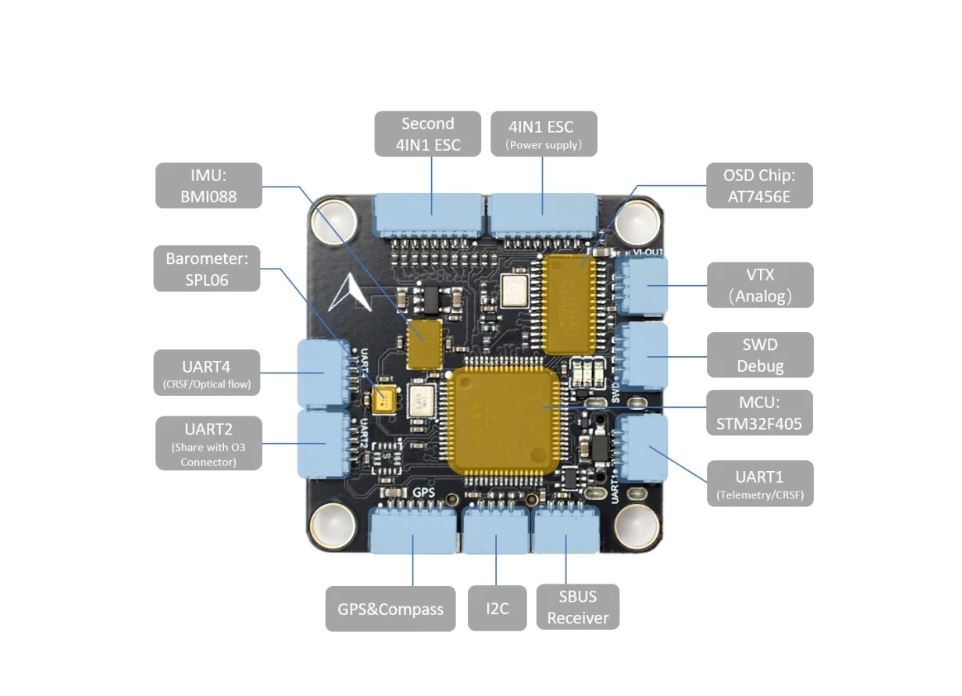
MCU: STM32F405RGT6, 168MHz, memoria flash de 1MB
IMU: BMI088
Baró: SPL06
OSD: AT7456E
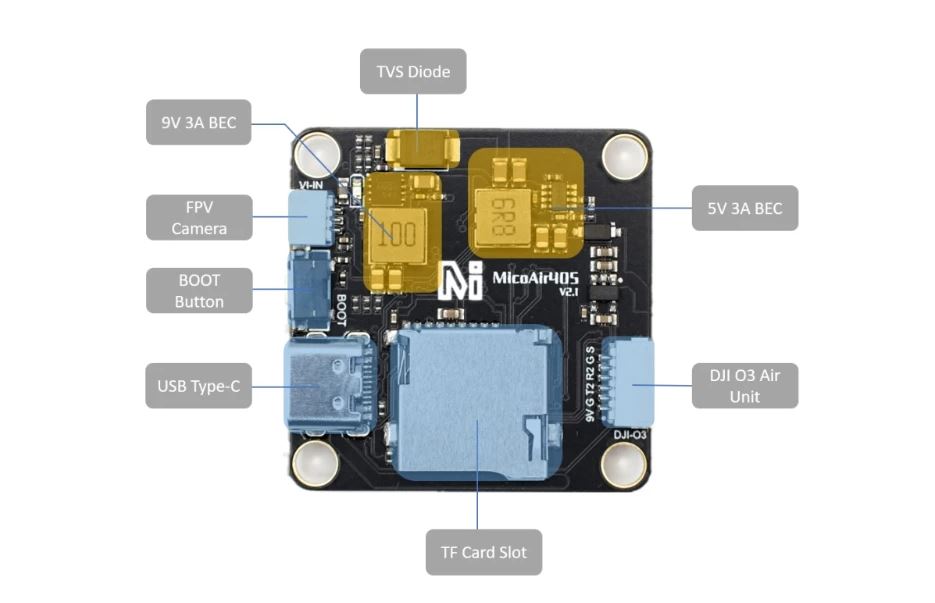
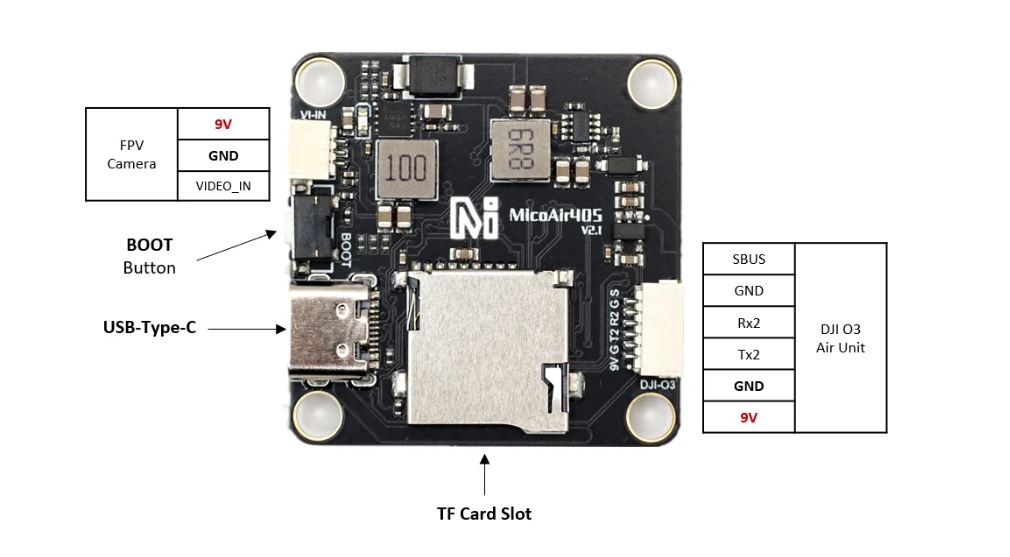
Ranura para tarjeta MicroSD
6*UART
10*PWM
1*I2C
1* SWD
2* ADC (VBAT, corriente)
USB tipo C
Salida BEC 5V 3A (para controlador, receptor, GPS, flujo óptico u otros dispositivos)
Salida BEC 9V 3A (para transmisor de video, cámara)
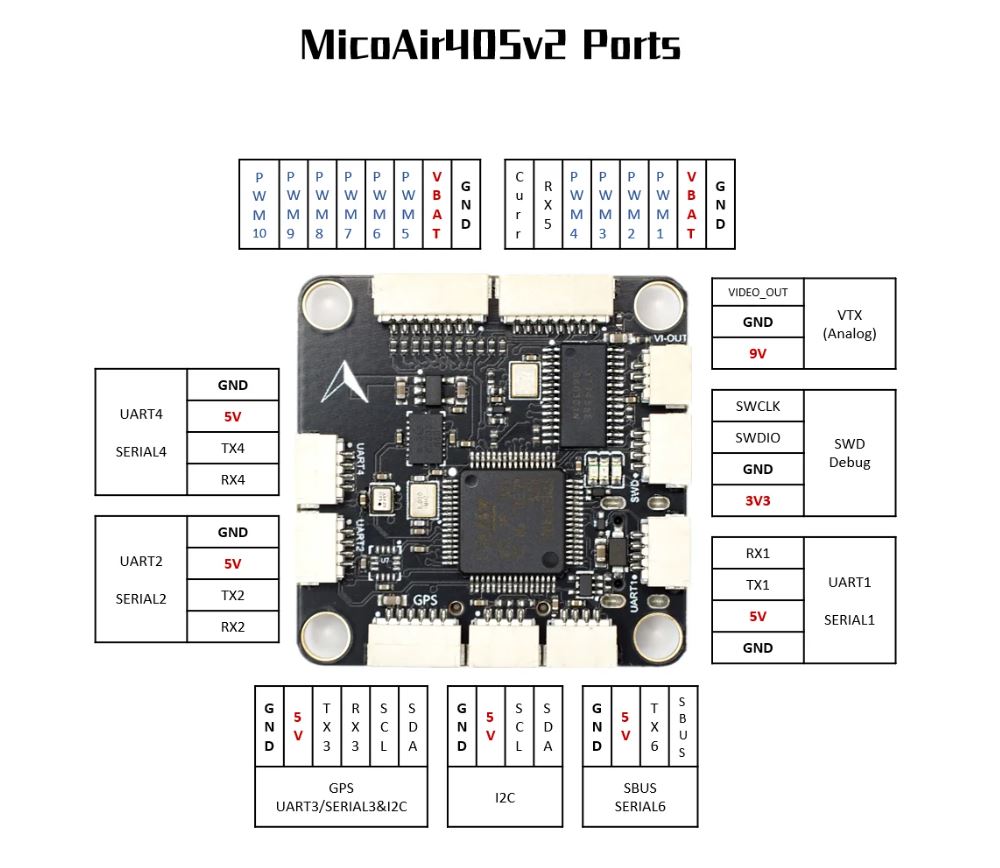
Mapeo UART
SERIE0 -> USB
SERIAL1 -> UART1 (habilitado para DMA)
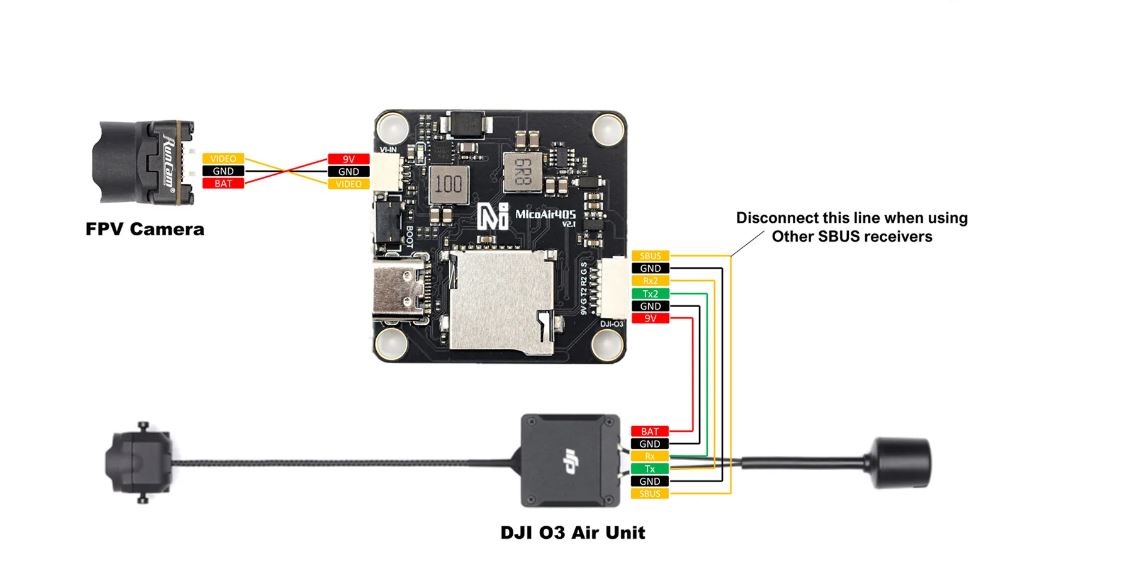
SERIAL2 -> UART2 (DJI-VTX, habilitado para DMA)
SERIE3 -> UART3 (GPS)
SERIAL4 -> UART4 (habilitado para DMA)
SERIAL5 -> UART5 (Telemetría ESC)
SERIAL6 -> UART6 (RX6 está invertido desde el pin SBUS, no hay DMA en TX6)
Entrada RC
La entrada RC predeterminada está configurada en el UART6_RX invertida desde el pin SBUS. Se deben aplicar otros protocolos RC en otro puerto UART como UART1 o UART4, y configurar el protocolo para recibir datos RC: SERIALn_PROTOCOL=23 y cambiar SERIAL6 _Protocol a algo distinto de ’23’
Soporte OSD
El MicoAir405 v2 admite OSD utilizando OSD_TYPE 1 (controlador MAX7456).
Soporte VTX
El conector SH1.0-6P admite una conexión de unidad aérea DJI O3. El pin 1 del conector es de 9v, así que tenga cuidado de no conectarlo a un periférico que requiera 5v.
Salida PWM
El MicoAir405v2 admite hasta 10 salidas PWM.
Los canales 1-8 admiten DShot.
Los canales 1-4 admiten DShot bidireccional. La salida PWM se comparte agrupada y cada grupo debe usar el mismo protocolo de salida:
1,2,5,6 son el grupo 1
3, 4 son el grupo 2
7,8 son del grupo 3
9,10 están en el grupo 4
Monitoreo de batería
La placa tiene un sensor de voltaje interno y conexiones en el conector ESC para una entrada de sensor de corriente externo.
El sensor de voltaje puede manejar hasta baterías LiPo 6S.
Los parámetros de batería predeterminados para Ardupilot) son:
BATT_VOLT_PIN 10
BATT_CURR_PIN 11
BATT_VOLT_MULT 21.2
BATT_CURR_SCALE 40.2
Brújula
El MicoAir405 v2 no tiene una brújula incorporada, pero puede conectar una brújula externa usando I2C en el conector SDA y SCL.
Físico
Montaje: 30,5 * 30,5 mm, Φ4 mm
Dimensiones: 36*36*8 mm
Peso: 9 g